Testovací polygon je hotový
Projekt města Plzně má zvýšit možnosti dynamického řízení dopravy, zlepšit dopravní odbavení lokality a přinést základ pro budoucí testování autonomní tramvaje.

Projekt města Plzně má zvýšit možnosti dynamického řízení dopravy, zlepšit dopravní odbavení lokality a přinést základ pro budoucí testování autonomní tramvaje.
Základ testovacího polygonu pro autonomní mobilitu v Plzni je hotový. Zprovoznila ho Správa informačních technologií města Plzně v červnu 2023 v lokalitě Bory – od křižovatky ulic Mánesova/Klatovská třída po tramvajovou zastávku Univerzita. Na celkem sedmi místech byly osazeny křižovatky a ulice chytrými technologiemi, které dokáží monitorovat dopravu ve městě, řídit plynulost silničního provozu, upřednostnit vozidla složek IZS či tramvaje nebo zaznamenat na přechodu chodce a cyklisty. Moderní technologie přispívají k lepší průjezdnosti a dopravnímu odbavení lokality. Do budoucna se uvažuje o jejich rozšíření na zbytek území města Plzně a využití polygonu při testování autonomní tramvaje, na níž se v Plzni pracuje.
Při realizaci na Borech bylo nutné osadit příslušnými systémy křižovatky a vybavit jimi i vozidla. Chytré kamery s prvky umělé inteligence umožňující analýzu obrazu, dále strategické detektory ovládající například tramvajovou výhybku a takzvané RSU jednotky přijímající příslušné signály byly instalovány na sedmi místech: na Klatovské třídě v křižovatkách s ulicemi Mánesova, Sukova, Dvořákova, Kaplířova a u výjezdu zdravotnické záchranné služby. Dále pak v Dobřanské ulici u výjezdu z hasičské stanice a na tramvajové smyčce v zastávce Univerzita.
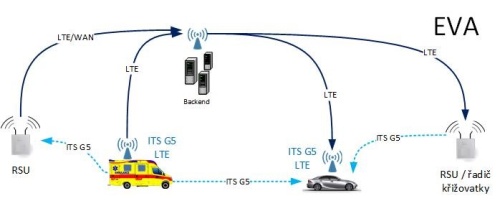
Hlavní částí řešení byla implementace centrálního prvku. Jedná se o speciální systém, který funguje jako nadstavba nad dopravní ústřednou. V centrálním prvku se koncentrují všechna důležitá data, která se podle jasných pravidel dále distribuují do prvků na nižších úrovních C-ITS systému (RSU/OBU), popř. do nadřazených národních centrálních prvků C-ITS. Komunikace C-ITS se všemi prvky C-ITS systému probíhá obousměrně. Systém zpracovává dopravní informace z připojených jednotek. Umožňuje manuální vkládání zpráv a informací a také komplexní dohled nad stavem systému.
Takzvané OBU jednotky, které dokáží vysílat signál do zařízení v křižovatkách a zajistit plynulý průjezd lokalitou, byly umístěny do pěti tramvají Plzeňských městských dopravních podniků, jednoho vozu zdravotnické záchranné služby a tří hasičských vozidel. Pro testování antikolizního systému je technologie Lidar nainstalována kromě jednoho vozidla MHD i ve voze SITMP kvůli testování a správě polygonu.
Projekt testovacího polygonu realizovala SITMP od prosince 2022 do června 2023. Společně se na jeho testovací i současné produkční fázi podílejí PMDP a Správa veřejného statku města Plzně. Realizace byla možná díky dotaci z prostředků Evropské unie, Národního plánu obnovy a zdrojům Ministerstva pro místní rozvoj ČR.
Projekt je detailněji popsán v článku na webu SITMP. Tiskovou zprávu města z představení chytré dopravy v Plzni najdete zde.