Test polygon – a solution for autonomous mobility
The purpose of the project is to create a polygon – a living laboratory – for testing, development in the field of autonomous mobility and dynamic traffic control.

The purpose of the project is to create a polygon – a living laboratory – for testing, development in the field of autonomous mobility and dynamic traffic control.
Since December 2022 we have been working on a project called Testing Polygon for Autonomous Mobility of the Statutory City of Pilsen. Its purpose is to create a polygon – a living laboratory – for testing, development in the field of autonomous mobility and dynamic traffic control.
The selected location is the area from the intersection of Sukova street / 17. Listopadu street – Klatovská street to the tram loop near Decathlon (tram stop Univerzita). There are also fire and rescue stations nearby and these vehicles are involved in the pilot testing. Sukova street, as one of the main access roads to the city, can be used to collect static traffic information.
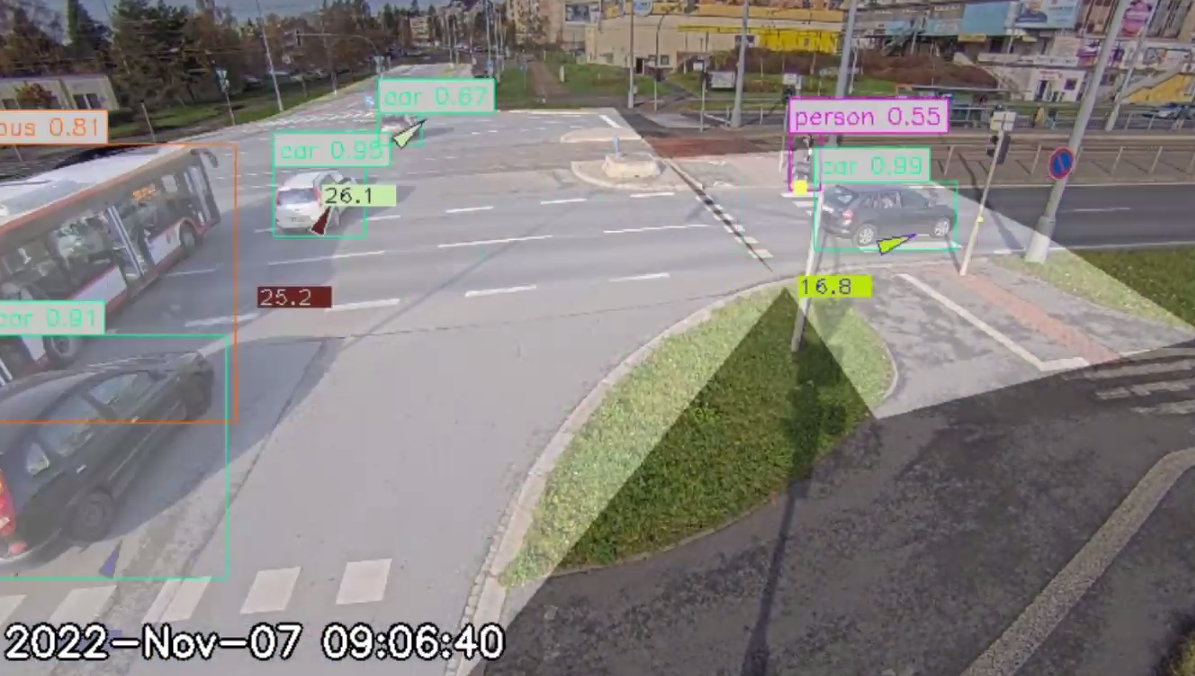
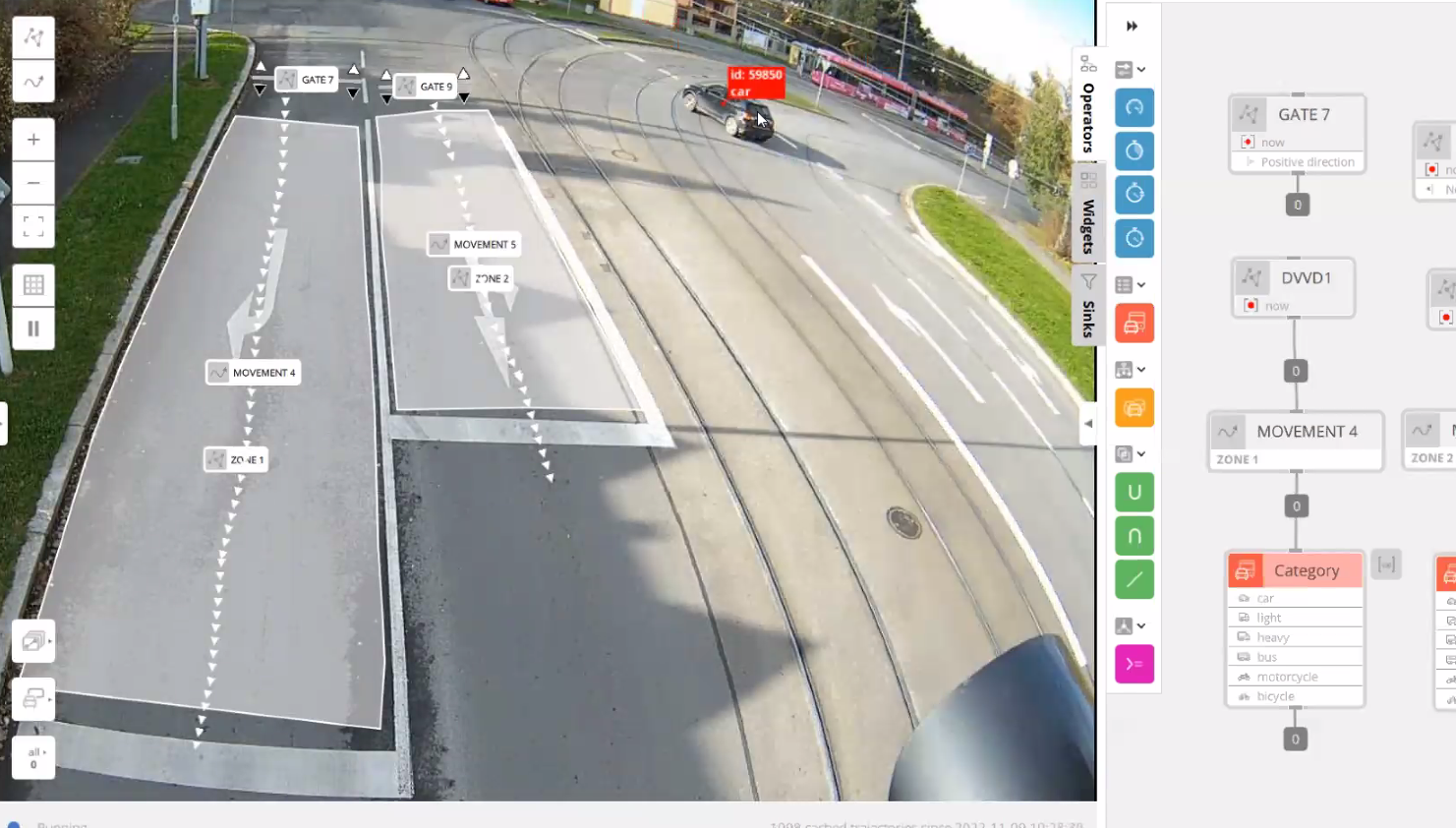
The project belongs to the Smart City concept due to its innovation – from the preparation phase to the clear objectives. The systems installed on a public transport vehicle and one test vehicle use newly installed detection elements (camera, radar) to obtain an image of the current situation in the immediate surroundings. In addition to the installation of the central element, the system is equipped with modules for switch control, an anti-collision system and a Crash Call system, i.e. a system for dealing with accidents or crisis events. New technologies have also been added to the intersections – sensors have been placed to detect pedestrian and cyclist movement. Reports from the systems are also used to calculate journey times, vehicle delays or average speeds.
The test polygon builds on the outputs of the 5G Pilsen project, which verified the use of autonomous mobility elements, and the DUET project (Digital Twin City – creating a 3D model of buildings, streets, public spaces).
Completion of the implementation, commissioning and testing of all components is expected in June 2023. After that, the project will be transferred to production operation, which will be provided by SITMP in cooperation with SVSMP.
The project amounting 17,8 million CZK was financed by the EU, the National Regeneration Plan and the Ministry of Regional Development of the Czech Republic.
In addition to the original scope of the project, we are also fitting selected intersections with air cleanliness sensors to test whether smoother traffic also means cleaner air. We want to use this overlap within the European project Climaborough, in which the City of Pilsen is also participating.